研究人员整合自动驾驶世界模型旨在提高仿真中的驾驶场景重建能力
- 2024-12-16 21:37:10
- 盖世汽车 阅读量:8678
盖世汽车讯 开发无需人类驾驶即可安全运行的车辆一直是人工智能研究领域的主要目标。由于仅在真实街道上测试自动驾驶车辆既不安全也不可行,因此其基础算法必须要在仿真中进行广泛的训练和测试。
尽管近年来用于训练自动驾驶模型的仿真平台有了显著改进,但它们仍然存在各种局限性。仿真技术主要分为两种:开环方法和闭环方法。开环方法中,输出不会影响未来的输入数据,而闭环方法则是输出会影响后续输入,产生自适应循环。
开环仿真技术通常更容易实现,但它们无法适应被测试模型在仿真中的变化或错误。相比之下,闭环方法能更好地反映动态的现实环境,从而可以更准确地评估系统的性能,但其对计算的要求也更高,而且并不总是能呈现复杂的机动和新的车辆轨迹。
声明:以上内容为本网站转自其它媒体,相关信息仅为传递更多企业信息之目的,不代表本网观点,亦不代表本网站赞同其观点或证实其内容的真实性。投资有风险,需谨慎。
本文地址:http://www.saucepan.shop/hot/75092.html
为您推荐
研究人员整合自动驾驶世界模型旨在提高仿真中的驾驶场景重建能力
盖世汽车讯开发无需人类驾驶即可安全运行的车辆一直是人工智能研究领域的主要目标。由于仅在真实街道上测试自动驾驶车辆既不安全也不可行,因此其基础算法必须要在仿真中进行广泛的训练和测试。
尽管近年来用于训...
2024-12-16 21:37:10
 上市险企前11月保费同比增长5.6%客户部分需求透支为“开门红”带来挑战
近日,A股五家上市险企相继披露今年前11月保费收入情况。
据21世纪经济报道记者统计,五家A股上市险企前11个月实现保费收入26667亿元,同比增长5.6%。其中,中国平安实现原保费收入7963...
2024-12-16 20:34:28
上市险企前11月保费同比增长5.6%客户部分需求透支为“开门红”带来挑战
近日,A股五家上市险企相继披露今年前11月保费收入情况。
据21世纪经济报道记者统计,五家A股上市险企前11个月实现保费收入26667亿元,同比增长5.6%。其中,中国平安实现原保费收入7963...
2024-12-16 20:34:28
 武汉:新政激活房地产市场企稳态势有望持续
九月下旬以来,在“促进房地产市场止跌回稳”的明确信号下,中央地方联动,打出了一套活跃市场的政策组合拳,多个一二线城市楼市持续回暖。在购房成本下降、核心区域供给增加等因素驱动下,武汉新房销售已连续两个月...
2024-12-16 17:19:12
武汉:新政激活房地产市场企稳态势有望持续
九月下旬以来,在“促进房地产市场止跌回稳”的明确信号下,中央地方联动,打出了一套活跃市场的政策组合拳,多个一二线城市楼市持续回暖。在购房成本下降、核心区域供给增加等因素驱动下,武汉新房销售已连续两个月...
2024-12-16 17:19:12
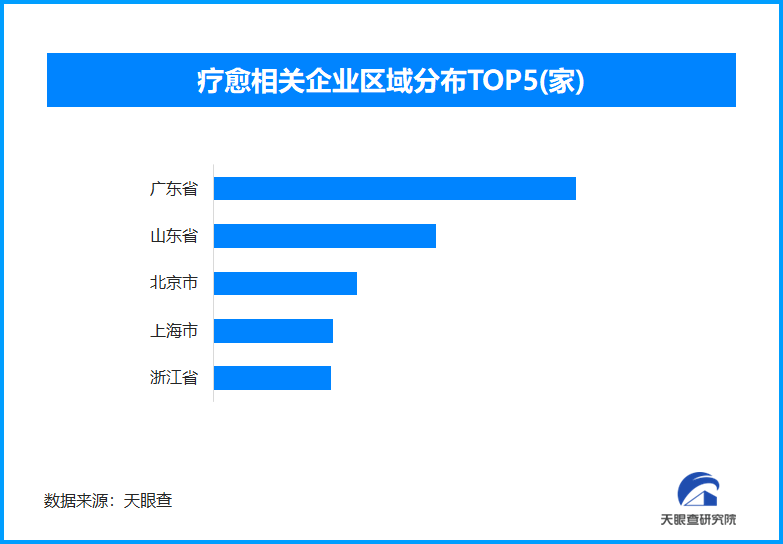
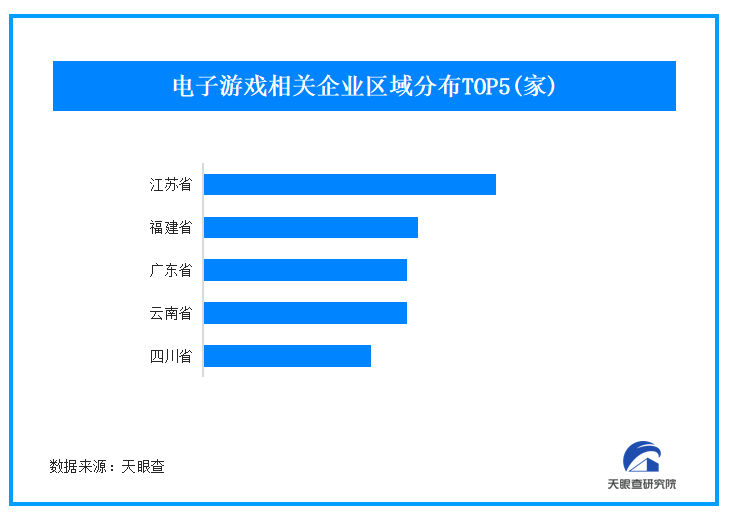
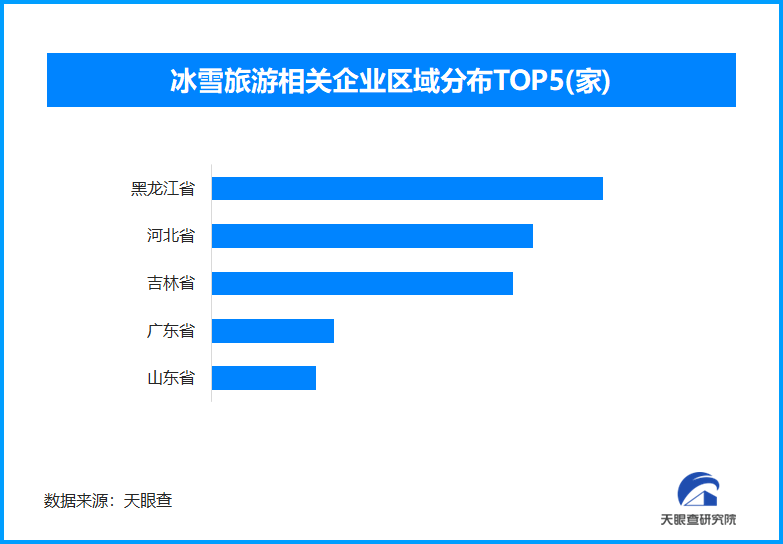 眼新知 — 2024年岁末文旅市场:从冬季项目到春节旅游,全面迎接旅游新热潮
步入2024年的尾声,中国文旅市场正展现出前所未有的活力与韧性。在政策的积极引导、消费需求的升级以及科技创新的推动下,文旅市场正迎来新的发展机遇。据中国文化和旅游部最新数据显示,2024年前三季度,国...
2024-12-16 16:36:48
眼新知 — 2024年岁末文旅市场:从冬季项目到春节旅游,全面迎接旅游新热潮
步入2024年的尾声,中国文旅市场正展现出前所未有的活力与韧性。在政策的积极引导、消费需求的升级以及科技创新的推动下,文旅市场正迎来新的发展机遇。据中国文化和旅游部最新数据显示,2024年前三季度,国...
2024-12-16 16:36:48